System Automatic train operation type DriveSWing CRV&AVV
Automatic train operation and ETCS
AŽD system for Automatic Train operation Drive SWing DRS-10 ATO over ETCS is connected, energy saving and interoperable compliant to ERTMS/ETCS specifications – onboard and trackside.
System Drive SWing DRS-10 main characteristics:
- Ready for mainlines – high-speed and regional passenger trains
- Ready for freight trains
- Energy and CO2 emissions savings 10-30 %
- Increasing traffic density and punctionality, dynamic time-table
- GoA 2 – decreasing demands on drivers = less stress, less errors
- Ready for ETCS Level 3
- ATO GoA2 in operation for 25 years at more than 300 vehicles
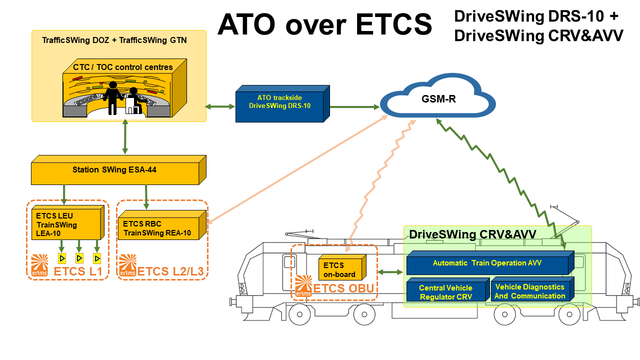
Basic block diagram of AZD solution for ATO over ETCS
Infosheets
For download
One of the main motives for automation on the railway is reduce the load on drivers by routine activities. Operating with the fact that the human brain responds more quickly to unpredictable events if it is not burdened by normal operation, the philosophy of the system is based on the maximum effort of the driver to relieve these activities.
However, this is not always understood in this way, with the exception of the opinion that the driver should drive, not "switch on the autopilot and let himself be driven". However, this is not the ATO principle.
Safe operation of train is controlled by ATP – Automatic train protection system like ETCS. ATO is automation system control the railway vehicle and in ideal case without any intervention from ETCS. For more flexible planning of railway traffic and interoperability needs is developed ATO trackside system to provide the train actual real-time time table and route map.
ATO is supporting role complementary to ETCS and gives the train driver the opportunity to control the vehicle and leave the system "in reserve" in case of concentration on solving a non-standard situations.
Brief ATO history in Czech Republic
1960’ Czechoslovak Railways initiated a research of the train driving automation. One of the final aims was saving of energy for traction, among other aims there were better utilization of track and of rolling stock parameters.
Main objective was:
- saving of energy for traction
- better utilization of track and rolling stock parameters
- decreasing of driver‘s workload
1966 First tests with Automatic Train Operation systems (consisting of Speed Regulator, Automatic Target Braking System and Energy Saving System) are performed at railcar class M 286.1
1970’ First Automatic Speed Control (ASC) Regulators, developed as basic elements of automation, were employed in regular operation (typical precision ±1 km/h). These regulators were capable to control a pneumatic train brake.
About 750 vehicles of all tractions (electric, diesel-electric, diesel-hydraulic) were equipped with ASC and most of them are still in regular operation. Also first successful tests of Energy Saving Device were carried out.
1980’ Mass implementation of Automatic Target Braking emerged in the Prague underground (Metro line C). On “great” railway, the pilot installations of Energy Saving Device (ESD) were under tests in commercial operation. But analog solution radically limited the further development.
The pilot installations on “great” railway with full (analogue) ATO were under tests in commercial operation when freight loco 242.256 (1985) was equipped by ATO.

Photo: Freight loco 242.256 on 18. 9. 1992, Author: David Prause
1991 The pilot installations of full (analogue) ATO were under tests in commercial operation.
1993 Digital solution with analogue interface to the vehicle tested in standard commercial operation, so ATO started its new life.
1996 Class 470 EMUs equipped with fully digital ATO GoA2. First EMU 470.001-002 with commercial ATO. All further EMUs class 471 are equipped with digital ATO during their manufacturing.
Most of new and refurbished vehicles produced in CZ are equipped with ATO.

Photo: 470 002-001 at Praha-Libeň on 30. 10. 1998, Author: Daniel Pavlíček
2000’ Deployment of ATO balises cross the railway network of Czech Republic. Today is covered about 30% of network (fixed ATO balises + virtual balises).
2008 - 2014 First implementation of ATO over ETCS as part of project: The implementation of pilot project ETCS L2 in the section Poříčany – Kolín, Czech Republic at train set EMU 471/971.042.
ATO AVV cooperation with ETCS at first installation before international standardisation.
ATO used ETCS information for on-track orientation, so no more dedicated ATO balises needed. ETCS provided to ATO realisation of dynamic speed profile and ATO provided an interface functions for service braking. Whole concept was easy for integration due to no complicated ETCS vital computer EVC to AVV interaction.
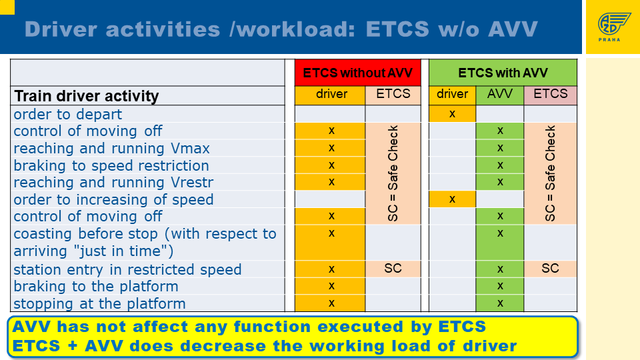
Figure: Driver activities /workload comparison for ETCS with and without ATO AVV
2014 AoE – ATO over ETCS standardisation works started. Results from pilot application in CZ were one of impotant imputs.
2020 ATO over ETCS according first UNISIG/Shift2Rail Subsets tests On the so-called Plum Line (Čížkovice - Obrnice) in Třebívlice with ATO trackside system Drive SWing DRS-10.
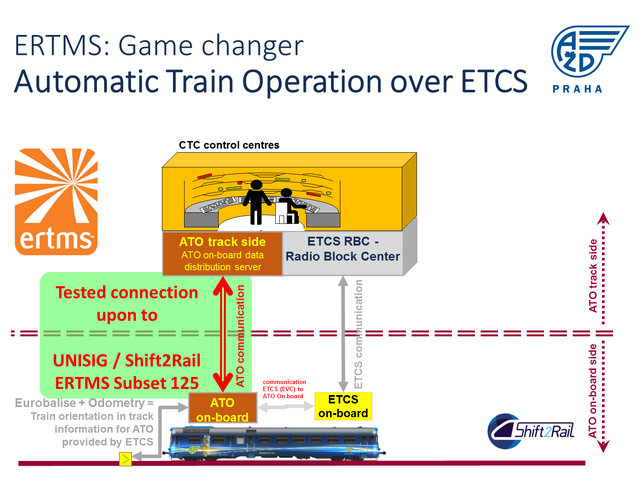
Figure: Test cases for ATO trackside to ATO on-board